
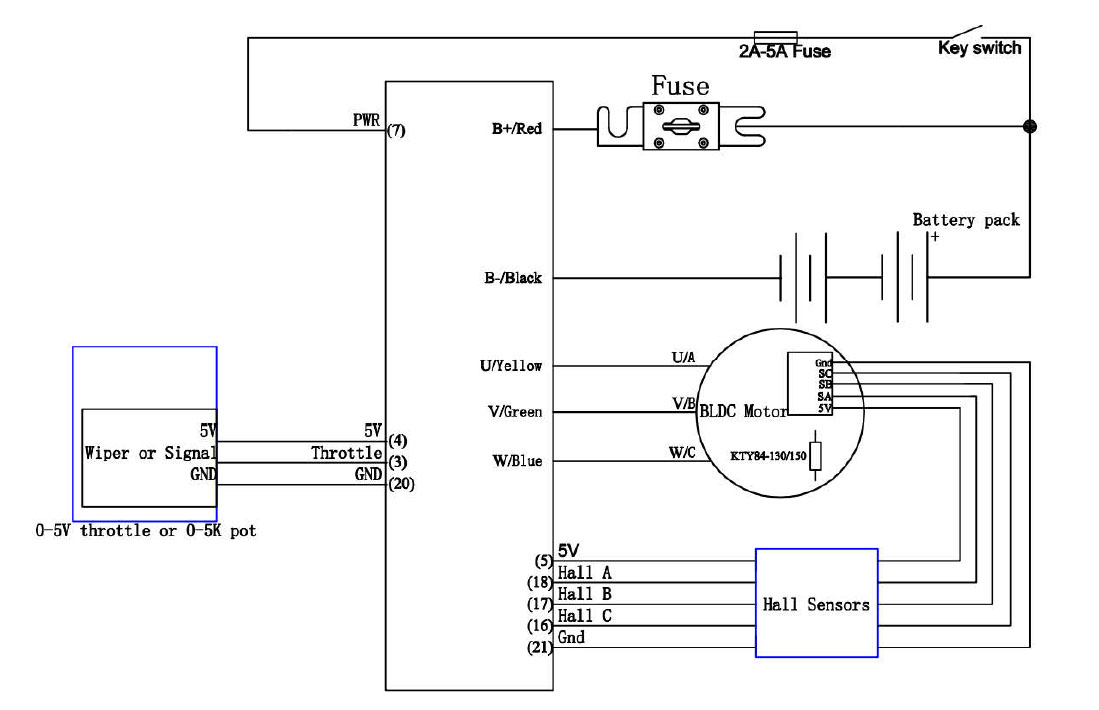
Podstawowy i minimalny schemat instalacji elektrycznej dla sterownika Kelly serii S
Po zrobieniu instalacji sterownik należy nauczyć czytania halli czyli wykonać operację konta identyfikacji, można tego dokonać przez komputer za pomocą złącza RS232 lub tablet czy też telefon z Androidem do tego będzie konieczny adapter Bluetooth.
Programy do konfiguracji można pobrać ze strony producenta www.kellycontroller.com/support
Proces nauczania:
1. Pojazd ustawiamy na stojaku tak aby tylne koło z silnikiem było w powietrzu i mogło swobodnie się obracać..
2. Za pomocą stacyjki uruchamiamy instalację i puszczamy z baterii B+ przez pin 7 w kostce sterownika. Teraz możemy się połączyć za pomocą oprogramowania ze sterownikiem i odczytać parametry sterownika. Pierwszą rzeczą jaką robimy to sprawdzamy czy pozycja kąta identyfikacji (Identification Angle) ma wartość 85. Jeśli się zgadza i wynosi 85 oznacza to tyle, że sterownik został fabrycznie skalibrowany a my musimy go ustawić pod nasz silnik.
3. W polu kąt identyfikacji (Identification Angle) wpisujemy 170 i zapisujemy tą wartość w programie, pojawi się komunikat o poprawnym zapisie w tym momencie musimy wyłączyć zasilanie sterownika przez stacyjkę.
4. Kolejnym krokiem jest włączenie stacyjki w tym momencie zaczyna nam świecić czerwona dioda na sterowniku a silnik będzie próbował robić ruchy raz do przodu raz do tyłu jest to właśnie proces nauczania. Trwa ten proces do 2 min.
5. Jeśli operacja nauczania się powiodła czerwona dioda zacznie mrugać naprzemiennie 2-3razy.
6. Wyłączamy zasilanie, odczekujemy kilka sekund i włączamy zasilanie przez stacyjkę.
7. Podłączamy się do programu i sprawdzamy czy w polu kąta identyfikacji jest wartość 85, oznacza to dla nas że proces się powiódł jeśli nadal istnieje 170 należy operacje nauczania przeprowadzić do skutku aż się pojawi 85.
Nie wolno wprowadzać tej wartości samodzielnie ! Przed procesem nauczania nie wolno używać manetki ani tez kręcić kołem ! Takie działania mogą uszkodzić sterownik !
Opis parametrów konfiguracyjnych sterowników Kelly Controller z serii KLS
Parametry programowalne
Program konfiguracyjny KLS umożliwia użytkownikom ustawienie parametrów zgodnie z rzeczywistym pojazdem środowisko pracy tak, aby było jak najlepiej.
Domyślne parametry sterownika nie są zalecane dla wszystkich zastosowań. Upewnij się, że ustawiłeś odpowiednie parametry przed wykonaniem jakiegokolwiek testu, aby uniknąć niebezpieczeństwa.
Klienci mogą tworzyć programy na komputerze PC lub w aplikacji na Androida
Przede wszystkim należy wykonać funkcję kąta identyfikacji dla kontrolera KLS
uruchomienie silnika. sterownik należy wcześniej podłączyć do akumulatorów, silnika i przepustnicy
Operacja identyfikacyjna, czyli nie wystarczy podłączyć tylko zasilanie (PWR = pin7)
do akumulatorów do pracy z kątem identyfikacji.
(1) Niskie napięcie: minimalne napięcie zgłaszania tej usterki - zakres 18 ~ 90
Sterownik nie będzie działał, gdy napięcie akumulatora jest bliskie wartości, aby chronić akumulator.
Sugestia: Ustaw zgodnie z praktyczną sytuacją, domyślnie jest ustawione na 18V.
(2) Over Volt: Maksymalne napięcie zgłaszania tej usterki - zakres 18 ~ 90
Sterownik nie będzie działał, gdy napięcie akumulatora jest wyższe niż wartość, aby chronić akumulator i sterownik.
Sugestia: Ustaw zgodnie z praktyczną sytuacją.
Domyślnie jest to 60 V dla kontrolera 48 V. Jest to 80 V dla kontrolera 60 V. Jest to 90 V dla kontrolera 72 V.
(3) Procent prądu: Procent prądu fazowego. Zakres: 20 ~ 100
Opis działania: Maksymalny prąd silnika to (wartość * prąd szczytowy sterownika).
Sugestia: Domyślne ustawienie fabryczne to 100%.
(4) Limit baterii: Ograniczenie prądu baterii, ograniczenie maksymalnej wartości prądu baterii. Zakres: 20 ~ 100
Opis działania: Ustaw maksymalny prąd baterii tak, aby chronić baterię. Niższa wartość oznacza a
niższy prąd wyjściowy akumulatora i lepszy efekt ochronny. Ale wpłynie to na zbyt niską wartość
przyśpieszenie.
Sugestia: Domyślne ustawienie fabryczne to 100%.
(5) Kąt identyfikacji: Pobierz instrukcję użycia kąta identyfikacyjnego
(6) TPS Low Err: Halla aktywny pedał, jeśli jest niższa niż wartość, zgłasza błąd typu TPS. Zasięg: 0 ~ 20
(7) TPS High Err: Halla aktywny pedał, jeśli jest wyższa niż wartość, zgłasza błąd typu TPS. Zasięg: 80 ~ 100
Jak zapewne wiesz, wyjście przepustnicy halla z Kelly wynosi około od 0,86 V do 4,2 V.
Nasz kontroler zgłosi kod błędu 3.3, jeśli wyjście przepustnicy halla jest poniżej 0,5 V lub powyżej 4,5 V. domyślnie.
Sterownik pomyśli, że przepustnica hali jest zwarta lub uszkodzona, jeśli wyjście jest poza zakresem od 0,5 V do 4,5 V.
Możesz ustawić napięcie progowe poniżej lub powyżej 0,5 V. Sterownik zgłosi kod 3.3 do ochrony systemu zgodnie z różnymi typami przepustnic halla. Ponieważ na świecie jest wielu różnych dostawców przepustnic do hal, początkowa moc wyjściowa nie może być zawsze w zakresie od 0,5 V do 4,5 V.
Ale nie ma znaczenia, jeśli wybierzesz potencjometr 0-5 V lub 3-przewodowy jako typ przepustnicy powiedzieć, te dwa ustawienia są przydatne tylko dla aktywnej przepustnicy lub pedału w hali, gdy wybrałeś przepustnicę wpisz 2.
Podobnie, ważne jest, aby ustawić napięcie wysokiego progu powyżej 4,5 V lub poniżej 4,5 V.
Zwykle napięcie wyjściowe hali wynosi maksymalnie 4,2 V, jeśli ustawisz je na niższą wartość, która jest bliska 4,2 V. może wywołać kod błędu w normalny sposób.
(8) Typ TPS: Typ TPS, 1: 0-5 V 3-przewodowy potencjometr 0-5 K, 5 K jest normalne, można użyć 2 K-20 K; 2: Aktywna przepustnica lub pedał Halla. Zakres: 1 ~ 2
(9) TPS Dead Low: TPS Dead Zone Low. Zakres: 5 ~ 40
Opis działania: Ustaw efektywny punkt początkowy przepustnicy
Sugestia: Ustaw zgodnie z praktyczną sytuacją, ustawienie fabryczne to 20% * 5 V = 1,0 V.
(10) TPS Dead High: TPS Dead Zone High. Zakres: 60 ~ 95
Opis działania: Ustaw efektywny punkt końcowy przepustnicy
Sugestia: Ustaw zgodnie z praktyczną sytuacją, ustawienie fabryczne to 80% * 5 V = 4,0 V.
(11) Typ czujnika hamulca: Typ czujnika hamulca dla trybu zmiennej regeneracji hamulca:
1: 0-5 V 3-przewodowy potencjometr 0-5 K, 5 K jest normalne, można użyć 2 K-20 K; 2: przepustnica lub pedał z aktywną halą. Zasięg: 1 ~ 2
(12) Czujnik hamulca Dead Low: Czujnik hamulca Dead Zone Low. Zakres: 5 ~ 40
Opis działania: Ustaw efektywny punkt początkowy przepustnicy
Sugestia: ustawienie fabryczne Wyłączone.
(13) Czujnik hamulca Dead High: Czujnik hamulca Dead Zone High. Zakres: 60 ~ 95
Opis działania: Ustaw efektywny punkt końcowy przepustnicy
Sugestia: Ustaw zgodnie z praktyczną sytuacją, ustawienie fabryczne to 80% * 5 V = 4,0 V.
(14) Max output Fre: Maksymalna częstotliwość wyjściowa. Jednostka: Hz
Opis działania: Wpłynie to na maksymalną prędkość silnika.
Sugestia: Ustaw zgodnie z praktyczną sytuacją, ustawienie fabryczne to 1000 Hz. Nie ustawiaj go
1000 Hz powyżej.
(15) Maksymalna prędkość: Maksymalna prędkość [obr / min]. Zakres: 0 ~ 15000 Domyślnie jest ustawiony na 4000 Oprogramowanie
Wersja 0109 może obsługiwać ustawienia 15000 obr./min w programie użytkownika.
(16) Max Fwd Speed%: Prędkość do przodu będąca procentem maksymalnej prędkości. Zasięg:
20 ~ 100 Domyślnie jest ustawiony na 100%
(17) Max Rev Speed%: Prędkość wsteczna procentu maksymalnej prędkości. Zasięg:
20 ~ 100 Domyślnie jest ustawiony na 100%
Prędkość Midspeed Forw, Prędkość Midspeed Rev, Prędkość Lowspeed Forw i Prędkość Lowspeed Rev
Zakres: 20 ~ 100 Domyślnie jest ustawiony na 100% Zarówno sterowanie F-N-R, jak i funkcja trzech prędkości. Nie możemy używać obu funkcji jednocześnie
Przełącznik biegów ma włączać sterowanie F-N-R, gdy ta pozycja jest wyłączona, możemy użyć trzech funkcja prędkości i odwrotnie.
Pin22 to port wejściowy przełącznika niskiej prędkości, a Pin12 to port wejściowy przełącznika wysokiej prędkości pin22 i pin12 są odłączone od pin11, sterownik jedzie ze średnią prędkością.
Trzy prędkości: Ta pozycja służy do włączania lub wyłączania funkcji trzech prędkości. Domyślnie jest ustawiona na 0
0: Funkcja trzech prędkości jest wyłączona. 1: Funkcja dwóch prędkości 2: Funkcja trzech prędkości jest włączona.
(18) Częstotliwość PWM: Częstotliwość pracy PWM. Jednostka: Khz
Opis działania: 20 kHz jest lepsze dla silnika piasty ze ścisłą kontrolą cichej.
Sugestia: Ustaw zgodnie z praktyczną sytuacją, ustawienie fabryczne to 20 kHz. Nie ustawiaj go
20 KHz powyżej.
Zakres wartości: 10 KHz lub 20 KHz
(19) Pedał H uruchamiający:
Zakres wartości: Włącz i Wyłącz
Opis działania: Jeśli jest włączona, kontroler wykryje aktualny stan pedału po włączeniu.
Jeśli przepustnica uzyska efektywną moc wyjściową, sterownik zgłosi błąd i nie będzie działać.
Sugestia: Ustaw zgodnie z praktyczną sytuacją, ustawienie fabryczne to Włączone.
(20) H-Pedal hamulca: zwolnienie pedału hamulca wysokiego poziomu
Zakres wartości: Włącz i Wyłącz
Opis działania: Jeśli włączone, kontroler wykryje aktualny stan pedału, kiedy zwolni się hamulec. Jeśli przepustnica uzyska efektywną moc wyjściową, sterownik zgłosi błąd i nie będzie działać.
Sugestia: Ustaw zgodnie z praktyczną sytuacją, ustawienie fabryczne to Wyłączone.
(21) NTL H-Pedal: położenie neutralne High Pedal Disable. Przydatne tylko w przypadku przełączania trzech biegów funkcja jest włączona.
Jeśli jest włączona, kontroler wykryje bieżące położenie pedału lub sygnał, gdy przełącznik jest w pozycji neutralna siła.
Jeśli przepustnica otrzyma skuteczny sygnał wyjściowy, sterownik nie będzie działać i zgłosi kod błędu.
Sugestia: Ustaw zgodnie z praktyczną sytuacją, ustawienie fabryczne to Wyłączone.
(22) Funkcja joysticka:
Jeśli jest włączona, sterownik może sterować silnikiem w dwóch kierunkach bez użycia przełącznika nawrotnego.
Tylko jedna przepustnica może napędzać silnik w kierunku do przodu i do tyłu.
Oprogramowanie sprzętowe drążka zmiany biegów można nazwać operacją wig-wag lub joystickiem.
Zwykle jest to przydatne przy projektach łodzi elektrycznych. Nadal możesz używać zwykłego potencjometru 0-5K lub przepustnica 0-5V dla kontrolera. Jeśli nie wybierasz joysticka to operowałeś przepustnicą w tym prędkość silnika wzrośnie, gdy przepustnica będzie wynosić od 0 V do 5 V.
Jeśli włączysz joystick dla tego kontrolera w programie użytkownika, uruchomisz silnik od 2,5V do 5V jest do przodu. 2,4V do 0V jest do tyłu. 2.4 V do 2.6 V to martwa strefa przepustnicy, klienci mogą regulować martwą strefę przepustnicy w użytkowniku program również.
Należy pamiętać, że zwykła przepustnica powróci do pierwotnego położenia po zwolnieniu przepustnicy.
Sugestia: ustawienie fabryczne to Wyłącz.
(24) Boost: Jeśli jest włączone, kontroler będzie przez chwilę wyprowadzał maksymalną moc.
Funkcja Boost to po prostu pozycja pełnego otwarcia przepustnicy po włączeniu przełącznika doładowania, nawet jeśli przepustnica nie jest w ogóle działał.
Funkcja Boost nadal opiera się na ograniczeniu prądu silnika i ustawień prądu akumulatora w programie użytkownika.
Jeśli jest wyłączona, sterownik może zapewnić tryb regeneracji czujnika hamulca na tym samym pinie co pin 2
Prosty, doładowania i hamowania analogowego regen używał tego samego pinu co pin2.
Sugestia: Ustaw zgodnie z praktyczną sytuacją, domyślne ustawienie fabryczne to Wyłączone
Funkcją jest zmienny tryb regeneracji hamulca.
(25) Przełącznik nożny: służy do mikroprzełącznika, jeśli jest włączony, sterownik akceptuje tylko przepustnicę sygnał po otrzymaniu prawidłowego sygnału z przełącznika nożnego.
Jeśli nie ma sygnału przełącznika nożnego, sterownik zignoruje sygnał przepustnicy.
Sugestia: Ustaw zgodnie z praktyczną sytuacją, ustawienie fabryczne to Wyłączone.
(26) Tempomat: Zakres wartości: Włącz i Wyłącz
Jeśli włączysz, jeśli przytrzymasz przepustnicę w określonej pozycji przez około 5 sekund, kontroler przejdzie w tryb Cruise
Funkcja tempomatu nie może być aktywowana podczas cofania Jeśli prędkość silnika jest poniżej 500 obr./min nie można włączyć tempomatu.
Zwolnij przepustnicę i przekręć ją ponownie lub włącz przełącznik hamulca, aby deaktywować tempomat.
Sugestia: ustawienie fabryczne to Wyłącz.
(27) Antypoślizgowe:
Jeśli ta opcja jest włączona, kontroler będzie próbował zapobiec szybszemu staczaniu się pojazdu z pochyłości, może próbować pomóc silnikowi zatrzymać się na zjeździe.
Funkcja pomaga tylko silnikowi zatrzymać się.
Sugestia: ustawienie fabryczne to Wyłącz.
(28) Zmień kierunek:
Jeśli kierunek nie jest zgodny z oczekiwaniami po zakończeniu operacji kąta identyfikacji, po prostu wybierz pozycję Zmień kierunek.
Kliknij przycisk Zapisz, aby aktywować funkcję Zmień kierunek. Kierunek silnika będzie taki jak się spodziewałeś się po zresetowaniu sterownika.
Sugestia: ustawienie fabryczne to Wyłącz.
Krok 2
(1) Prąd znamionowy silnika: Gdy sterownik wykonuje pracę z kątem identyfikacyjnym bez obciążenia na wale silnika wymagane jest natężenie prądu dla operacji identyfikacyjnej moc jest bardzo wysoka, należy zwiększyć ten parametr do wyższej wartości, w przeciwnym razie utrzymywać go na 80. Jeśli moc silnika jest niska należy ją zwiększyć na wyższą wartość, aby dopasować silnik do pracy z kątem identyfikacji.
(2) Magnesy silnika: Magnesy silnika, Liczba magnesów pary * 2. Zakres: 2 ~ 128
Sugestia: Ustaw zgodnie z rzeczywistą ilością magnesów silnika na tabliczce znamionowej silnika, ustawienie fabryczne jest to 8.
(3) Typ czujnika prędkości: Typ czujnika prędkości, 2: Hal, 3: Resolver, 4: Line Hall. Zakres: 2 ~ 4
Różne typy czujników, domyślnie jest ustawiony na 2
Jeśli masz silnik z czujnikami prędkości 5 V, sin / cosin, GND, wybierz go na 4 i proszę
zapytaj o model KLS-8080IPS przed złożeniem zamówienia.
(4) Bieguny resolvera: bieguny resolvera, liczba biegunów pary * 2. Zakres: 2 ~ 32
Jest używany tylko dla czujnika typu Resolver.
(5) Czujnik temperatury silnika: Czujnik temperatury silnika,
0: Brak,
1: KTY84-130 lub 150,
2: KTY83-122.
Zakres 0-2
Wyłączenie przy wysokiej temp. ° C: Wyłączenie przy wysokiej temp. Silnika, wartość nominalna 130 ° C. Zakres: 60 ~ 170
Resume ° C: Motor High Temp Resume Temp, wartość nominalna 110 ° C Sterownik będzie próbował wznowić pracę, gdy temperatura silnika osiągnie 110 stopni w środku. Zakres: 60 ~ 170
(6) Line Hall Zero: Jest użyteczne tylko wtedy, gdy czujnik prędkości jest na 4.
Przydatne tylko dla kontrolera KLS-8080IPS.
Krok 3
(1) RLS_TPS Brk%: RLS TPS Procent hamowania, procent zwolnienia BRK pedału w maks.
hamowanie. Zakres: 0 ~ 50
Służy do regulacji prądu regeneracji zwalniania typu trybu regeneracji przepustnicy tak długo, jak przepustnica jest całkowicie zwolniona.
Ustawienie fabryczne to 0
(2) NTL Brk%: procent hamowania NTL, procent neutralnego hamowania podczas maksymalnego hamowania. Zasięg: 0 ~ 50
Przydatne tylko po włączeniu przełącznika trzech biegów w programie użytkownika.
Regeneracja nastąpi, gdy zmienisz przełącznik F-N-R z przodu lub do tyłu na neutralna pozycja.
Ustawienie fabryczne to 0
(3) Accel Time: Accel Time, czas TPS Torque od 0 do max, dokładność 0,1 s, 5 jest równa
0,5 s. Zakres: 1 ~ 250
Ustawienie fabryczne to 10
(4) Accel Rls Time: Accel Release Time, czas TPS Torque od max do 0, dokładność 0,1s.
Zakres: 1 ~ 250
Ustawienie fabryczne to 1
(5) Czas hamowania: czas hamowania, czas momentu hamowania od 0 do maks., Dokładność 0,1 s. Zasięg:1 ~ 250
Ustawienie fabryczne to 15
(6) Brake Rls Time: Czas zwolnienia hamulca, czas momentu hamowania od maks. Do 0, dokładność 0,1 s. Zakres: 1 ~ 250
Ustawienie fabryczne to 1
(7) BRK_SW Brk%: BRK_SW Procent hamowania, procent BRK_SW przy maksymalnym hamowaniu. Zasięg: 0 ~ 50
Tryb regeneracji przełącznika hamulca. Po zwolnieniu przepustnicy należy włączyć przełącznik hamulca aby nastąpiła regeneracja.
Ustawienie fabryczne to 10
(8) BRK_AD Brk%: Jest używany do regulacji maksymalnego procentu regeneracji w trybie zmiennej regeneracji hamulca.
Ten tryb regeneracji nie wymaga już przełącznika hamulca do obsługi kontrolera KLS.
(9) Torque Speed KP: Procent prędkości Kp w trybie momentu obrotowego. Zakres: 0 ~ 10000 Ustawienie fabryczne to 3000
Torque Speed KI: całkowanie prędkości Ki w trybie momentu. Zakres: 0 ~ 500 Ustawienie fabryczne to 80
Speed Err Limit: Limit błędu prędkości w trybie momentu obrotowego. Zakres: 50 ~ 4000 Ustawienie fabryczne to 1000
Te trzy parametry są używane do regulacji PID.
Jeśli uważasz, że przyspieszenie jest bardzo silne, ustaw je na niższą wartość.
(10) Change Dir brake: Zakres wartości: Enable i Disable
Jest to przydatne tylko wtedy, gdy włączysz funkcję joysticka.
Jeśli chcesz uzyskać szybką zmianę kierunku za pomocą funkcji joysticka, możesz włączyć opcję Change Dir element hamulca w programie użytkownika.
Pomoże to silnikowi szybko zmienić kierunek silnika po zmianie przepustnicy z 0 V na 5 V lub od 5V do 0V.
Sugestia: ustawienie fabryczne to Wyłącz.
(11) Odszkodowanie w%
Próbowano zwiększyć bieżące zużycie podczas operacji Anti-Slip.
(12) IVT BRK MAX i IVT BRK MIN: Te dwie pozycje są przydatne tylko wtedy, gdy włączona jest funkcja joysticka w programie użytkownika, gdy chcesz użyć funkcji Change Dir Brake, aby skrócić czas opóźnienia kiedy zmieniasz kierunek podczas obsługi joysticka, istnieje ograniczenie obrotów, aby użyć Change Dir Funkcja hamowania, która jest aktywowana tylko wtedy, gdy obroty silnika są pomiędzy IVT BRK MIN a IVT
BRK MAX.
Sugestia: ustawienie fabryczne to Wyłącz.
(13) Moment obrotowy Kp: 3000
Moment obrotowy Prędkość Ki: 80
Limit błędu prędkości: 1000
Te parametry są używane do regulacji PID, jeśli przyspieszenie jest zbyt agresywne, proszę zmniejszyć te trzy parametry w tym samym czasie i odwrotnie, zmienić prędkość obrotową Kp co 1000 jednostek, prędkość obrotowa Ki co 100 jednostek i Speed Err limit co 500 jednostek.


